合肥工業(yè)大學(xué)土木與水利工程學(xué)院建筑環(huán)境與技術(shù)工程系 金朝 周沛 王松杰
【摘 要】變風(fēng)量空調(diào)系統(tǒng)(VAV)的控制方式目前多采用PID控制,當(dāng)房間負(fù)荷變化不大時(shí),該方法具有一定的優(yōu)勢(shì),而當(dāng)房間負(fù)荷變化較大且頻繁波動(dòng)時(shí)傳統(tǒng)的PID控制會(huì)導(dǎo)致系統(tǒng)末端不能快速響應(yīng),如超調(diào)量大、調(diào)節(jié)時(shí)間變長(zhǎng)、溫度波動(dòng)較大等問題,造成風(fēng)量與房間溫度的失調(diào),進(jìn)而影響室內(nèi)人員的熱舒適。本文利用Simulink軟件對(duì)某VAV空調(diào)系統(tǒng)進(jìn)行建模,采用常規(guī)PID控制、模糊PID控制、MPC控制三種不同的控制算法,對(duì)比分析了房間溫度變化的動(dòng)態(tài)性能指標(biāo),結(jié)果表明采用MPC控制和模糊PID控制可以對(duì)復(fù)雜多變的室內(nèi)負(fù)荷做出快速響應(yīng),減少系統(tǒng)的頻繁啟停,提高系統(tǒng)的穩(wěn)定性與控制精度,進(jìn)而改善室內(nèi)的熱舒適。
【關(guān)鍵詞】Simulink 模糊PID MPC VAV空調(diào)系統(tǒng)
0 引言
VAV(Variable Air Volume變風(fēng)量)空調(diào)是通過改變送風(fēng)量來調(diào)節(jié)房間溫度的空調(diào)系統(tǒng),具有節(jié)能及舒適性等優(yōu)點(diǎn)。一般的VAV空調(diào)系統(tǒng)采用PI控制器的定靜壓控制,根據(jù)設(shè)定溫度和實(shí)際溫度的偏差來調(diào)節(jié)阻尼器,引起的靜壓變化令變頻器改變風(fēng)機(jī)轉(zhuǎn)速,進(jìn)而改變風(fēng)量[1]。PID控制是變風(fēng)量空調(diào)系統(tǒng)最常見的控制,但是大部分PID控制難以達(dá)到用戶期望的要求[2]。為了提高控制性能,相關(guān)學(xué)者基于PID控制提出了新的算法:基于模型自我整定的辨識(shí)法、基于規(guī)則的模糊PID算法、基于神經(jīng)網(wǎng)絡(luò)的PID控制器、基于蟻群算法的PID控制器和基于支持向量機(jī)的PID控制器等[3]。李卓函[4]等設(shè)計(jì)出了基于相關(guān)系數(shù)辨識(shí)的PID自整定控制器,并通過溫控實(shí)驗(yàn)證明了該方法具有良好的效果。程貝貝[5]等人設(shè)計(jì)了VAV空調(diào)系統(tǒng)RBF神經(jīng)網(wǎng)絡(luò)PID控制器,經(jīng)過實(shí)驗(yàn)證明了控制器的有效性和節(jié)能型。姚瑤[6]等人根據(jù)蟻群算法改進(jìn)PID控制器,并對(duì)變風(fēng)量空調(diào)的二階系統(tǒng)進(jìn)行仿真,發(fā)現(xiàn)基于蟻群算法的PID控制器超調(diào)量更小、響應(yīng)速度更快。為了改善系統(tǒng)性能,施媛波[7]提出一種基于支持向量機(jī)的PID控制器參數(shù)整定方法,將PID控制的參數(shù)作為支持向量機(jī)的輸入,實(shí)現(xiàn)PID參數(shù)在線調(diào)整的功能,并通過實(shí)驗(yàn)證明了基于支持向量機(jī)PID控制器參數(shù)在線調(diào)整的有效性,同時(shí)輸出響應(yīng)曲線的效果更好。本文以某VAV控制系統(tǒng)為研究對(duì)象,采用Simulink仿真軟件,通過對(duì)比三種不同的控制算法:常規(guī)PID控制、模糊(Fuzzy) PID控制、MPC(Model Predictive Control)控制,分析比較系統(tǒng)對(duì)室內(nèi)溫度控制的動(dòng)態(tài)性能指標(biāo),從而提高系統(tǒng)的穩(wěn)定性與控制精度。
1 工程概況
本文以合肥某實(shí)驗(yàn)中心作為研究對(duì)象。該實(shí)驗(yàn)中心總面積約為227m3,包括實(shí)驗(yàn)室、辦公室、走廊、展覽室、員工宿舍等。空調(diào)系統(tǒng)采用一臺(tái)全變頻風(fēng)冷熱泵機(jī)組進(jìn)行供冷與供熱,會(huì)議室、辦公室和實(shí)驗(yàn)室采用全空氣空調(diào)系統(tǒng),每個(gè)房間各安裝一個(gè)VAV控制末端。實(shí)驗(yàn)中心整個(gè)空調(diào)系統(tǒng)采用DDC控制[8],同時(shí)配備有中央監(jiān)控系統(tǒng),可以實(shí)現(xiàn)對(duì)室內(nèi)參數(shù)及空調(diào)系統(tǒng)運(yùn)行參數(shù)的實(shí)時(shí)監(jiān)測(cè)。
VAV末端的控制策略采用定靜壓控制,定靜壓控制運(yùn)用的是前饋控制,最先是通過改變風(fēng)閥開度調(diào)節(jié)送風(fēng)量,風(fēng)閥的變化會(huì)導(dǎo)致管內(nèi)靜壓的變化,測(cè)量風(fēng)管內(nèi)最不利點(diǎn)的靜壓與設(shè)定的靜壓相比,所得的差值信號(hào)通過變頻器,再由變頻器調(diào)節(jié)風(fēng)機(jī)轉(zhuǎn)速,進(jìn)而調(diào)節(jié)管內(nèi)靜壓。因此房間所需的風(fēng)量就是風(fēng)閥開度通過靜壓這個(gè)媒介不斷調(diào)節(jié)風(fēng)機(jī)轉(zhuǎn)速,得到需要的送風(fēng)量[9-11]。
通過對(duì)空調(diào)系統(tǒng)的運(yùn)行情況進(jìn)行分析發(fā)現(xiàn):會(huì)議室整個(gè)8月份的VAV空調(diào)開啟的時(shí)間和次數(shù)比較少,僅有4天近乎是全天開啟。當(dāng)房間負(fù)荷波動(dòng)較劇烈時(shí),溫度一直控制不到設(shè)定溫度,且房間溫度控制的反應(yīng)明顯不夠迅速,從而導(dǎo)致較長(zhǎng)時(shí)間的過熱或過冷,影響人員舒適度。如圖1所示,在8月8日這一天,根據(jù)送風(fēng)溫度曲線可以判斷空調(diào)從上午8:00到下午18:00基本處于開啟狀態(tài)。房間的設(shè)定溫度是25℃,但是房間的實(shí)際溫度卻不能穩(wěn)定在設(shè)定溫度線上。從上午11:00到下午13:30這個(gè)階段,房間溫度處于過熱狀態(tài);從下午13:00到下午18:00點(diǎn),房間溫度一直處于過冷狀態(tài),可以看出PID控制精度還有進(jìn)一步提升的空間。
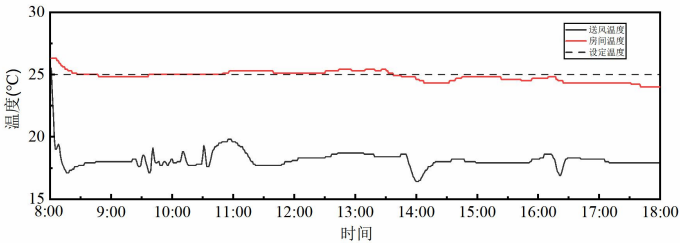
圖1 8月8日房間溫度控制情況
2 PID算法的改進(jìn)
此處定靜壓控制的算法是PID控制,由于PID控制是對(duì)于控制輸出的線性調(diào)節(jié),而實(shí)際的空調(diào)系統(tǒng)則是非線性的,PID的三個(gè)固定的參數(shù)無法滿足實(shí)際空調(diào)系統(tǒng)的調(diào)節(jié)[12]。為了滿足空調(diào)系統(tǒng)的非線性特征,引入了根據(jù)實(shí)際情況粗略在線調(diào)整參數(shù)的模糊PID算法。此外,為了避免空調(diào)系統(tǒng)控制中出現(xiàn)大的延遲而導(dǎo)致的房間溫度的過冷和過熱,引入模型預(yù)測(cè)控制MPC控制算法。以下分別對(duì)PID控制、Fuzzy PID控制和MPC控制進(jìn)行簡(jiǎn)單描述。
2.1 PID控制
PID控制稱為比例、積分和微分控制,是目前最常用的控制器。其基本原理是設(shè)定值和實(shí)際值的差值通過比例、微分和積分處理后,累加得到的數(shù)值就是所需的控制量。由于PID控制屬于典型的無模型控制,不要求精確的數(shù)學(xué)模型。可以通過調(diào)節(jié)自身三個(gè)參數(shù)來使?jié)M足輸入和輸出的需求,此時(shí)PID自身就變成了就該輸入和輸出而言的數(shù)學(xué)模型。因此PID控制最重要的就是三個(gè)參數(shù)值,參數(shù)值是否合適影響控制結(jié)果的響應(yīng)。目前常用的PID整定技術(shù)有Ziegler-Nichols整定法、臨界比例度法、衰減曲線法、試湊法、理論整定法等。被控對(duì)象的數(shù)學(xué)模型確定了以后,可以通過以上整定方法近似得到PID三個(gè)控制參數(shù)。本次模型的PID參數(shù)通過整定后參數(shù)為:KP=8,Ki=0.3,Kd=-3。
2.2 Fuzzy PID控制
由于外界因素的干擾和被控對(duì)象的變化,實(shí)際的空調(diào)系統(tǒng)常處于一個(gè)非線性的狀態(tài),從而使得最初整定得到的PID參數(shù)不再適用。因此,需要一個(gè)能使得PID三個(gè)參數(shù)能隨著情況變化自我整定的算法,使得參數(shù)在非線性的條件下也能非線性的自我調(diào)節(jié),時(shí)刻保證參數(shù)最優(yōu)。本文選取了比較常見的模糊PID控制算法來改進(jìn)原有的PID算法。
模糊PID是結(jié)合模糊控制規(guī)則和PID控制原理的產(chǎn)物。當(dāng)被控對(duì)象模型和參數(shù)發(fā)生改變時(shí),原有的PID參數(shù)不再適用,這時(shí)模糊PID可以通過人工設(shè)置的規(guī)則將PID的參數(shù)進(jìn)行在線修正。這些人工設(shè)置的規(guī)則是根據(jù)專業(yè)人員對(duì)實(shí)際情況的長(zhǎng)期總結(jié)而得出的結(jié)論,是憑經(jīng)驗(yàn)對(duì)參數(shù)的粗略估計(jì)[13-14]。模糊控制的具體步驟是:
1)通過設(shè)定值和反饋值得到控制誤差e和控制誤差變化率ec;
2)選擇合適量化因子,將e和ec轉(zhuǎn)化為模糊控制器的輸入E和EC;
3)將E和EC模糊化,轉(zhuǎn)化成固定的模糊值E*和EC*;
4)通過模糊規(guī)則得到對(duì)應(yīng)于每個(gè)E*和EC*的模糊輸出C*;
5)對(duì)模糊輸出C*去模糊化得到精確輸出U*,去模糊化的方法有最大隸屬度法、重心法等;
6)通過因子將通過模糊控制器得到的精確輸出轉(zhuǎn)化為實(shí)際控制量u。
根據(jù)上述內(nèi)容可知,模糊控制直接得到的是一個(gè)模糊輸出,而模糊PID控制是通過模糊控制得到Kp、Ki、Kd的三個(gè)模糊值。相對(duì)于傳統(tǒng)固定的PID參數(shù),模糊PID實(shí)現(xiàn)了參數(shù)粗略自整定,綜合擁有PID和模糊控制的優(yōu)點(diǎn)。根據(jù)PID控制誤差響應(yīng)曲線進(jìn)行調(diào)節(jié),確定合適的量化因子、比例因子、三個(gè)參數(shù)變化范圍和模糊控制規(guī)則,在Matlab中調(diào)用模糊控制模塊,編寫模糊控制程序后進(jìn)行仿真。基于Simulink設(shè)計(jì)的會(huì)議室模糊PID控制器如圖2所示:
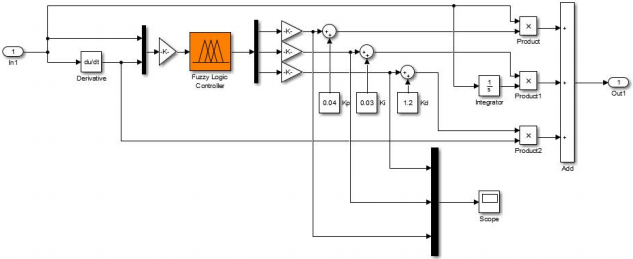
圖2 會(huì)議室模糊PID控制器
2.3 MPC控制
MPC(Model predictive control)是通過對(duì)下一時(shí)刻的輸出進(jìn)行預(yù)測(cè)并提前做出相應(yīng)來實(shí)現(xiàn)調(diào)節(jié)。線性MPC本質(zhì)是求解一個(gè)二次規(guī)劃問題,先完成系統(tǒng)優(yōu)化,再進(jìn)行跟蹤。目前大多數(shù)先進(jìn)的控制都是基于MPC算法的多輸入多輸出控制,它可以解決PID控制存在的變量之間相互耦合的特點(diǎn),適用約束條件、大純滯后、非最小相位和非線性過程[15-16]。MPC控制主要由以下兩部分構(gòu)成:基于模型的預(yù)測(cè)和滾動(dòng)優(yōu)化。模型的作用在于預(yù)測(cè)下一時(shí)刻的期望值,根據(jù)k+1時(shí)刻的設(shè)定輸出和k時(shí)刻狀態(tài)預(yù)測(cè)k+1時(shí)刻的輸出,使其盡可能接近k+1時(shí)刻的設(shè)定值。然而,由于外部干擾,預(yù)測(cè)輸出和實(shí)際輸出存在差異,根據(jù)這個(gè)偏差值求解得到響應(yīng)的下一時(shí)刻應(yīng)有的控制量,將控制量的第一個(gè)分量作用于當(dāng)前采樣時(shí)間,來消除這個(gè)偏差。下一個(gè)采樣時(shí)間重復(fù)上述過程。因此優(yōu)化是每個(gè)采樣時(shí)間都有的離散型優(yōu)化,滾動(dòng)式向前推進(jìn)。

圖3 MPC控制結(jié)構(gòu)原理圖
圖3為MPC控制結(jié)構(gòu)原理圖,其中ysp是系統(tǒng)設(shè)定值;yr是參考軌跡;u為輸出;y為實(shí)際輸出值;ym為模型輸出;ye為預(yù)測(cè)輸出。如圖所示,在單位采樣時(shí)間里,根據(jù)設(shè)定值ysp和當(dāng)前實(shí)際輸出值y得到輸出的參考曲線yr;這個(gè)參考曲線與預(yù)測(cè)曲線有個(gè)偏差,偏差通過滾動(dòng)優(yōu)化轉(zhuǎn)換為控制量來控制被控對(duì)象,使得預(yù)測(cè)輸出與參考輸出之間的誤差盡可能小。而下一時(shí)刻的預(yù)測(cè)輸出ye是基于當(dāng)前模型輸出ym和模型輸出與實(shí)際輸出的偏差值e得到的。將得到的控制狀態(tài)量的第一個(gè)元素作用于系統(tǒng),在下一個(gè)采樣時(shí)間重復(fù)上述過程,不斷優(yōu)化[17][18]。
MPC最后形成的問題基本上是一個(gè)二次規(guī)劃問題,利用損失函數(shù)來求未來控制量,利用二次規(guī)劃問題使得損失值最小,得到所需的未來控制量。其通用優(yōu)化問題的模型為:
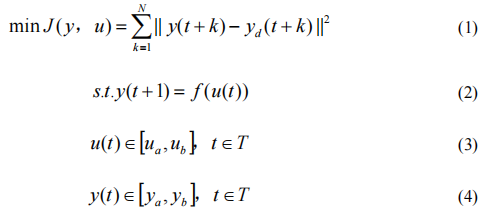
目標(biāo)函數(shù)表示系統(tǒng)的狀態(tài)y(t+k)和期望的狀態(tài)yd(t+k)在未來N個(gè)時(shí)間內(nèi)都要盡可能接近。約束(2)表示被控對(duì)象的動(dòng)態(tài)特性,約束(3)和(4)表示控制量u(t)和狀態(tài)量y(t)受一個(gè)上下線的約束。
在Matlab/simulink中編輯MPC模塊,設(shè)置合適的參數(shù)。首先設(shè)置樣本時(shí)間,樣本時(shí)間太大無法對(duì)干擾做出反應(yīng),太小會(huì)導(dǎo)致過多的計(jì)算量,樣本時(shí)間約介于開環(huán)系統(tǒng)的響應(yīng)的上升時(shí)間的十分之一和二十分之一之間的范圍比較合適。由于開環(huán)系統(tǒng)響應(yīng)時(shí)間約為20s,本次設(shè)置樣本時(shí)間為1s。一個(gè)周期預(yù)測(cè)未來的時(shí)間步長(zhǎng)稱為預(yù)測(cè)范圍,表示控制器對(duì)未來的預(yù)測(cè)程度,大概為20到30個(gè)樣本,本次設(shè)預(yù)測(cè)時(shí)域?yàn)?0s。控制范圍內(nèi)是優(yōu)化器優(yōu)化的參數(shù),表示控制移動(dòng)時(shí)間步長(zhǎng)的次數(shù),通常只有前幾對(duì)控制動(dòng)作會(huì)對(duì)預(yù)測(cè)的輸出行為產(chǎn)生重大影響,過多只會(huì)增加系統(tǒng)的復(fù)雜性,選擇控制范圍最好的經(jīng)驗(yàn)就是將其設(shè)置為預(yù)測(cè)范圍的10~20%,本次設(shè)為2s。也可以運(yùn)用MPC模塊的自動(dòng)調(diào)節(jié)功能,調(diào)節(jié)至響應(yīng)最理想的狀態(tài),此時(shí)的參數(shù)即為最優(yōu)參數(shù)。
3 控制仿真與結(jié)果分析
以該會(huì)議室為例進(jìn)行控制仿真建模,此處模擬的是夏季VAV系統(tǒng)運(yùn)行狀態(tài),房間的VAV BOX處于常開的狀態(tài),其面積約為33m3。變風(fēng)量末端由兩臺(tái)最大風(fēng)量為0.17m3/s、最小風(fēng)量為0.024m3/s的VAV BOX構(gòu)成,建模時(shí)將該房間的變風(fēng)量系統(tǒng)合并為一臺(tái)最大風(fēng)量為0.34m3/s、最小風(fēng)量是0.048m3/s 的VAV BOX。結(jié)合會(huì)議室的空調(diào)系統(tǒng),用Simulink建立的基于PID的末端控制如圖4所示,VAV末端控制采用串級(jí)控制。設(shè)置仿真時(shí)間為2000s,設(shè)定房間溫度為25℃,負(fù)荷變化采用隨機(jī)正態(tài)分布,10s變化一次,平均值為2kW。

圖4 會(huì)議室VAV末端控制模型
采用PID、Fuzzy PID和MPC分別控制房間溫度,得到房間溫度和風(fēng)量控制響應(yīng)如圖5和圖6所示:圖5表示了房間溫度隨著負(fù)荷變化的響應(yīng)曲線,可以看出運(yùn)用PID控制的室內(nèi)溫度不易收斂,震蕩較明顯,且調(diào)節(jié)時(shí)間為1800s,調(diào)節(jié)時(shí)間長(zhǎng)勢(shì)必會(huì)影響室內(nèi)人員的熱舒適;而模糊PID對(duì)溫度曲線的特能改善了很多,超調(diào)量為4.8%;MPC控制的曲線能迅速收斂,超調(diào)量4%。表1給出了房間溫度響應(yīng)曲線特性表,調(diào)節(jié)時(shí)間直接反映了控制系統(tǒng)達(dá)到控制溫度所需要的時(shí)間,調(diào)節(jié)時(shí)間越短,達(dá)到熱舒適所需要的時(shí)間就越短。通過對(duì)比發(fā)現(xiàn),F(xiàn)uzzy PID控制算法的調(diào)節(jié)時(shí)間最短為550s,而常規(guī)PID控制則需要30分鐘才能使控制溫度達(dá)到穩(wěn)定狀態(tài)。模擬結(jié)果表明Fuzzy PID與MPC控制均優(yōu)于常規(guī)PID控制。
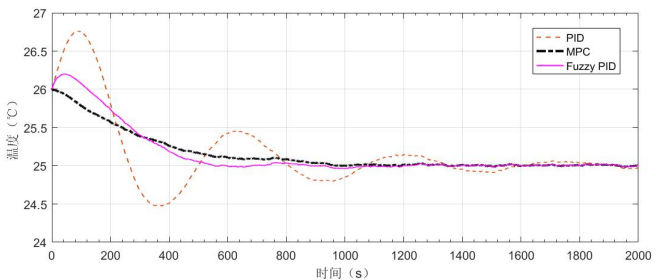
圖5 房間溫度響應(yīng)曲線

圖6 房間送風(fēng)量響應(yīng)曲線
表1 溫度響應(yīng)特性分析

用Simulink模擬系統(tǒng)物理參數(shù)變化的房間溫度響應(yīng)。模擬工作時(shí)間是從上午8點(diǎn)至下午6點(diǎn);令設(shè)定溫度在上午8:00~13:00之間為25℃,下午13:00~18:00點(diǎn)為26℃;房間內(nèi)的空氣比熱容從0.9~1.5kJ/(kg·℃)變化;房間負(fù)荷設(shè)定在0~4KW隨機(jī)變化,如圖7所示;
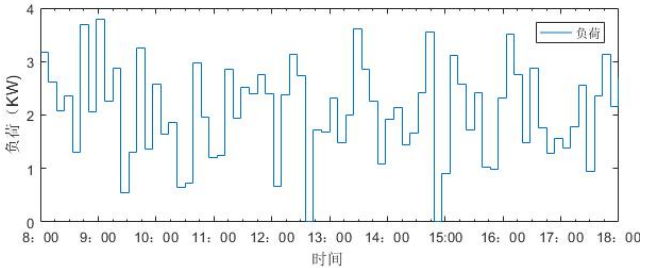
圖7 會(huì)議室一天冷負(fù)荷變化
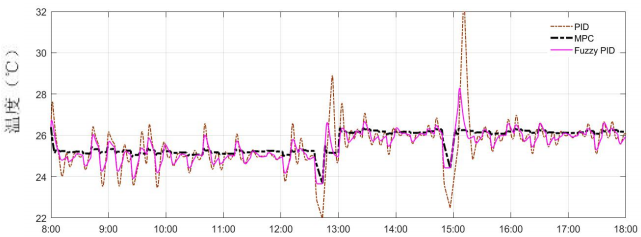
圖8 不同控制算法下的房間溫度響應(yīng)
Simulink運(yùn)行結(jié)果表明,PID控制的波動(dòng)幅度最大,控制效果最差,在下午1點(diǎn)前和下午3點(diǎn)左右,PID控制的溫度響應(yīng)曲線波動(dòng)劇烈,最高超調(diào)量有6℃。;Fuzzy PID控制對(duì)波動(dòng)的情況略有改善,F(xiàn)uzzy PID控制的溫度相應(yīng)曲線和設(shè)定值的誤差的絕對(duì)值不大于1℃;;MPC控制控制效果最好,MPC控制的溫度相應(yīng)曲線和設(shè)定值得誤差的絕對(duì)值不大于0.2℃,基本無超調(diào)。先進(jìn)的算法控制相對(duì)于傳統(tǒng)PID控制最大的改變就是超調(diào)量更小,除去在下午1點(diǎn)前和下午3點(diǎn)左右的劇烈波動(dòng),其他時(shí)間PID控制的溫度相應(yīng)曲線和設(shè)定值得誤差的絕對(duì)值不大于1.5℃。系統(tǒng)發(fā)生劇烈波動(dòng)的時(shí)刻出現(xiàn)在下午1點(diǎn)前和下午3點(diǎn)左右,通過觀察發(fā)現(xiàn)該兩個(gè)時(shí)刻的負(fù)荷為0。但由于系統(tǒng)的延遲作用,負(fù)荷作用于傳感器周圍空氣溫度需要一定時(shí)間,負(fù)荷為0時(shí)傳感器檢測(cè)到的還是上一時(shí)刻的房間溫度值。此時(shí)的送風(fēng)量也是對(duì)應(yīng)于該時(shí)刻的送風(fēng)量,因此會(huì)造成房間溫度的過冷。等到下一時(shí)刻,溫度傳感器檢測(cè)到房間溫度低于設(shè)定值,通過變頻器調(diào)節(jié)風(fēng)機(jī)來降低送風(fēng)量來實(shí)現(xiàn)房間溫度的回升。由于送風(fēng)量不能為負(fù)數(shù),此時(shí)即使風(fēng)閥為全關(guān)狀態(tài)也無法改變負(fù)荷為0狀態(tài)下的過冷現(xiàn)象。因此在13:00前和下午3點(diǎn)左右出現(xiàn)的過冷現(xiàn)象與控制效果無關(guān),究其原因歸結(jié)于系統(tǒng)信號(hào)傳遞的延遲性。
綜上,面對(duì)負(fù)荷變化較大且波動(dòng)較頻繁的房間,常規(guī)的PID算法控制精度不高,送風(fēng)量容易偏高或偏低,從而導(dǎo)致房間溫度的過冷或過熱。而MPC可以很好的解決響應(yīng)超調(diào)問題,但是對(duì)于房間溫度響應(yīng)的過冷現(xiàn)象,只能適當(dāng)降低其誤差的絕對(duì)值,調(diào)節(jié)時(shí)間沒有明顯減小,過冷現(xiàn)象依舊存在。
4 結(jié)論
從三個(gè)控制算法對(duì)房間溫度的控制效果來看,F(xiàn)uzzy PID 和MPC的控制效果相對(duì)于PID控制均有改善,采用MPC控制和模糊PID控制可以對(duì)復(fù)雜多變的室內(nèi)負(fù)荷做出快速精準(zhǔn)的響應(yīng),減少系統(tǒng)的頻繁啟停,提高系統(tǒng)的穩(wěn)定性與控制精度,進(jìn)而改善室內(nèi)的熱舒適。模糊PID控制雖然能粗略的調(diào)節(jié)PID參數(shù),但是調(diào)節(jié)值的數(shù)量和調(diào)節(jié)能力有限,并且模糊PID的規(guī)則編制特別依賴專家人工經(jīng)驗(yàn),對(duì)象模型不同編制內(nèi)容也不一樣。MPC控制效果更好,尤其可以處理多輸入多輸出的系統(tǒng),在非線性處理上也有優(yōu)勢(shì),缺點(diǎn)是受限于慢變的系統(tǒng),對(duì)微處理器的運(yùn)算速度要求較高。對(duì)于模擬中0負(fù)荷情況下出現(xiàn)的溫度曲線波動(dòng),是由于系統(tǒng)的延遲作用導(dǎo)致的,但是系統(tǒng)延遲一般不可避免,現(xiàn)實(shí)中由于房間的蓄熱能力更強(qiáng),不可能出現(xiàn)溫度突增的情況。模擬結(jié)果顯示新的控制算法相對(duì)于PID控制在對(duì)室溫控制精度上確有改進(jìn),風(fēng)閥開度和送風(fēng)量調(diào)節(jié)更加精準(zhǔn)對(duì)人體舒適度影響較小,建議優(yōu)先采用MPC控制算法。
參考文獻(xiàn)
[1] 陳炯德,王子軒,姚曄, 等.變風(fēng)量空調(diào)系統(tǒng)用非線性模型預(yù)測(cè)控制方法研究[J].制冷學(xué)報(bào),2019,40(6):62-69.
[2] 劉玲玲.PID參數(shù)整定技術(shù)的研究及應(yīng)用[D].河南:鄭州大學(xué),2010.
[3] 劉金琨.先進(jìn)PID控制 MATLAB仿真(第2版) [M].北京:電子工業(yè)出版社,2004.9
[4] 李卓函,孟祥泉,王峰, 等.基于相關(guān)系數(shù)辨識(shí)的PID自整定控制器[J].儀表技術(shù)與傳感器,2011,(4):83-86,96.
[5] 程貝貝,任慶昌,白燕.VAV空調(diào)系統(tǒng)RBF神經(jīng)網(wǎng)絡(luò)PID控制器的設(shè)計(jì)與實(shí)現(xiàn)[J].中國(guó)電子商務(wù),2011,(2):110-111.
[6] 姚瑤,李曼珍.蟻群算法在變風(fēng)量空調(diào)控制系統(tǒng)中的應(yīng)用研究及仿真[J].工業(yè)控制計(jì)算機(jī),2014,(8):70-71.
[7] 施媛波.支持向量機(jī)在PID控制器參數(shù)整定中的仿真研究[J].計(jì)算機(jī)仿真,2010,27(12):203-206.
[8] 李淋淋.變風(fēng)量(VAV)空調(diào)系統(tǒng)的DDC控制[D].陜西:西安建筑科技大學(xué),2003.
[9] 唐志偉,王剛.定靜壓控制變風(fēng)量系統(tǒng)的分析[C].中國(guó)能源學(xué)會(huì).第三屆中國(guó)能源科學(xué)家論壇論文集.2011:1634-1637
[10] 李琳琳,姚若玉.變風(fēng)量空調(diào)系統(tǒng)控制方法綜述[J].渭南師范學(xué)院學(xué)報(bào),2003,18(2):30-33.
[11] 楊國(guó)忠,李康.VAV系統(tǒng)中定靜壓與變靜壓控制分析[J].智能建筑與城市信息,2005,(9):93-95.
[12] 王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機(jī)械科學(xué)與技術(shù),2011,30(1):166-172.
[13] 鄭濱輝.模糊控制在中央空調(diào)變頻節(jié)能及其末端房間的應(yīng)用研究[D].浙江:浙江大學(xué),2012.
[14] 蘇明,陳倫軍,林浩.模糊PID控制及其MATLAB仿真[J].現(xiàn)代機(jī)械,2004,(4):51-55.
[15] 楊洪祥.基于廣義預(yù)測(cè)控制的變風(fēng)量空調(diào)末端仿真與控制研究[D].北京:北京工業(yè)大學(xué),2009.
[16] 王乘熙,李澤,郝萬(wàn)君.MPC在空調(diào)系統(tǒng)中的應(yīng)用綜述[J].現(xiàn)代信息科技,2019,3(21):43-45.
[17] Gongsheng Huang. Model predictive control of VAV zone thermal systems concerning bi-linearity and gain nonlinearity[J]. Control Engineering Practice,2011,19(7).
[18] 黃孟偉.基于狀態(tài)空間的多區(qū)域VAV空調(diào)系統(tǒng)建模及其優(yōu)化控制研究[D].上海:上海交通大學(xué),2014.
備注:本文收錄于《建筑環(huán)境與能源》2021年4月刊 總第42期(第二十屆全國(guó)暖通空調(diào)模擬學(xué)術(shù)年會(huì)論文集)。版權(quán)歸論文作者所有,任何形式轉(zhuǎn)載請(qǐng)聯(lián)系作者。